")
Satura rādītājs:
- Autors John Day day@howwhatproduce.com.
- Public 2024-01-30 10:57.
- Pēdējoreiz modificēts 2025-01-23 14:59.

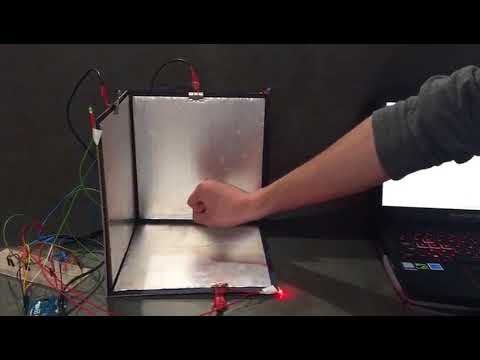

Šajā instrukcijā ir paskaidrots, kā rokas kustību var izsekot 3D telpā, izmantojot kapacitatīvās noteikšanas principu. Mainot attālumu starp uzlādētu alumīnija foliju un roku, kondensatora jauda mainīsies. Šo metodi var izmantot kā zemas klases alternatīvu inerciālām un optiskām sistēmām, lai izsekotu kustībai 3D telpā. Šajā prototipā mēs pievienojām gaismas diodes, kas spīdēs, kad objekts pārvietosies pārāk tuvu alumīnija folijas loksnei.
1. darbība. Nepieciešamie rīki un materiāli
- 3x 270k omu rezistors
- 3x 10k omu rezistors
- 3x Alligator klips
- 1x sarkana gaismas diode
- 1x zila gaismas diode
- 1x zaļa gaismas diode
- 3x 220 omu rezistors
- lodēt
- Karstuma sarukums
- vairoga kabelis
- Arduino Uno
- Alumīnija folijs
- Kartons
- Lente
- Izsmidziniet līmi
- Maizes dēlis
- Savienojuma vadi (dažāda garuma)
2. darbība: rāmja veidošana




Izgrieziet trīs kvadrātveida kartona gabalus (250x250 mm) un trīs kvadrātveida alumīnija folijas gabalus (230x230 mm). Vienā alumīnija folijas pusē uzklājiet smidzināšanas līmi un katru uzklājiet uz kartona gabaliņiem. Šajā prototipā alumīnija folijas loksnes darbosies kā mūsu kapacitatīvie sensori. Tāpēc pārliecinieties, ka starp alumīnija foliju un kartona malu ir pietiekami daudz vietas, lai pēc rāmja salikšanas nebūtu kontakta starp dažādām folijas loksnēm. Kad folija ir uzklāta uz kartona, ir pienācis laiks salikt trīs kartona gabalus, izmantojot lenti, lai pabeigtu rāmi. Vēlreiz pārliecinieties, ka starp dažādām alumīnija folijas loksnēm nav kontakta.
3. solis: vairoga vadu pievienošana plāksnei un Arduino



Lai savienotu folijas ar ķēdi, ir svarīgi izmantot ekranētu kabeli. Izmantojot parastos kabeļus, radīsies antenas efekts un traucēs jūsu sensoru rādījumi. Pārliecinieties, ka jums ir 3 ekranēti kabeļi, kuru garums ir aptuveni 50 cm. Paņemiet vienu kabeli, noņemiet vadu, nogrieziet ekranēšanas vadus un izmantojiet tikai iekšējo vadu, lai to savienotu, pielodējot vadu pie aligatora skavas. Pārliecinieties, ka uzklājat siltuma sarukumu, lai aizsegtu lodēšanas savienojumu. Piestipriniet aligatora skavas pie alumīnija folijas.
Pievienojiet visus vairoga vadus maizes dēļa pozitīvajai rindai. Pēc tam pievienojiet šo pozitīvo rindu Arduino 5V savienojumam. Tagad noņemiet galveno vadu no vairoga kabeļa un paralēli pievienojiet 10 kΩ un 220 kΩ rezistoru. Pievienojiet to Arduino izejas portam (mēs izmantojām 8, 9 un 10).
Atkārtojiet šo darbību vēl 2 reizes citām prototipa lidmašīnām.
4. solis: gaismas diodes vadu savienošana




Lodējiet gaismas diodes galus pie garas stieples, lai tas varētu sasniegt attiecīgo plākšņu stūrus no arduino plates.
Mēs izmantojām tapas 2, 3 un 4 kā mūsu LED izejas tapas. Šī izeja ir savienota ar maizes dēli un savienota ar gaismas diodes pozitīvo kāju. Pēc tam gaismas diodes negatīvā kājiņa ir savienota ar 330 omu rezistoru. Otrs rezistora gals ir savienots ar maizes dēļa zemi, kas ir savienota ar Arduino zemi. Atkārtojiet to visām 3 gaismas diodēm. Mūsu prototipā zilā gaismas diode ir savienota ar Y plakni, sarkanā gaismas diode ar Z plakni un zaļā gaismas diode ar X plakni. Piestipriniet gaismas diodes atbilstošajām plaknēm, lai saņemtu tiešu atgriezenisko saiti, izmantojot prototipu.
Ja neizmantojat maizes dēli un vēlaties vairoga kabeli savienot tieši ar Arduino, pievienotajā attēlā varat redzēt labu lodēšanas savienojumu pārskatu. Jūsu pēdējiem savienojumiem vajadzētu izskatīties kā pārskata attēlam.
5. darbība: kodēšana
Pielikumā mēs ievietojām kodu, ko izmantojām šim eksperimentam. Papildu ieskatiem pēc katras galvenās komandas tiek ievietots komentārs, kurā paskaidrots, kas notiek kodā. Atveriet kodu savā Arduino programmatūrā savā datorā un augšupielādējiet to savā Arduino. Ja izmantojat klēpjdatoru, pārliecinieties, vai tas tiek uzlādēts; pretējā gadījumā jūsu prototips nedarbosies.
6. darbība: prototipa izmantošana
Šis 3D kustības izsekošanas veids ir ļoti jutīgs pret apkārtējiem mainīgajiem. Tāpēc noteikti kalibrējiet koda vērtības atbilstoši savai situācijai. Lai iegūtu pareizās vērtības, varat vienkārši izmantot seriālo monitoru. Padoms: jūs varat izveidot kalibrēšanu pats, kur, palaižot kodu, tiek ņemtas vidējās vērtības + 10 %. Video ir parādīts, kā prototipam pareizi darboties.
Ieteicams:
Arduino augu monitors ar augsnes kapacitatīvo sensoru - apmācība: 6 soļi

Arduino augu monitors ar augsnes kapacitatīvo sensoru - apmācība: Šajā apmācībā mēs uzzināsim, kā noteikt augsnes mitrumu, izmantojot kapacitatīvo mitruma sensoru ar OLED displeju un Visuino. Noskatieties video
Cilvēka acu kustības izsekošana: 6 soļi

Cilvēka acu kustības izsekošana: šī projekta mērķis ir uztvert cilvēka acs kustību un parādīt tā kustību uz LED gaismas komplektu, kas ir novietots acs formā. Šāda veida projektiem potenciāli varētu būt daudz pielietojumu robotikas un jo īpaši huma jomā
Izsekošana un izsekošana maziem veikaliem: 9 soļi (ar attēliem)
")
Izsekošana un izsekošana maziem veikaliem: šī ir sistēma, kas paredzēta maziem veikaliem, kas ir paredzēts uzstādīt uz e-velosipēdiem vai motorolleriem, lai veiktu piegādi nelielā attālumā, piemēram, maizes ceptuve, kas vēlas piegādāt konditorejas izstrādājumus. Ko nozīmē izsekošana un izsekošana? Izsekošana un izsekošana ir sistēma, ko izmanto
Acu kustības izsekošana, izmantojot infrasarkano sensoru: 5 soļi

Acu kustības izsekošana, izmantojot infrasarkano sensoru: es izmantoju infrasarkano staru sensoru, lai uztvertu acu kustības un kontrolētu gaismas diodi. Es izveidoju acu ābolus ar LED lenti NeoPixel
Automatizējiet gaismu, izmantojot MESH kustības sensoru: 3 soļi (ar attēliem)
")
Automatizējiet gaismu, izmantojot MESH kustības sensoru: Vai bieži aizmirstat izslēgt apgaismojumu? Vienmēr ir iespējams aizmirst izslēgt apgaismojumu, izejot no mājas vai istabas, taču ar MESH kustības sensoru mēs atrisinājām problēmu, izmantojot noteikšanas un neatklāšanas funkcijas, lai palīdzētu jums atvieglot